Publications
The following is a categorized list of my publications in reverse chronological order, generated by jekyll-scholar. As this list may not always be up to date, the complete and most recent publication record can be found on my Google Scholar.
2026
-
IPCAIConVibNet: Needle Detection during Continuous Insertion via Frequency-Inspired FeaturesarXiv preprint arXiv:2603.01147, 2026
-
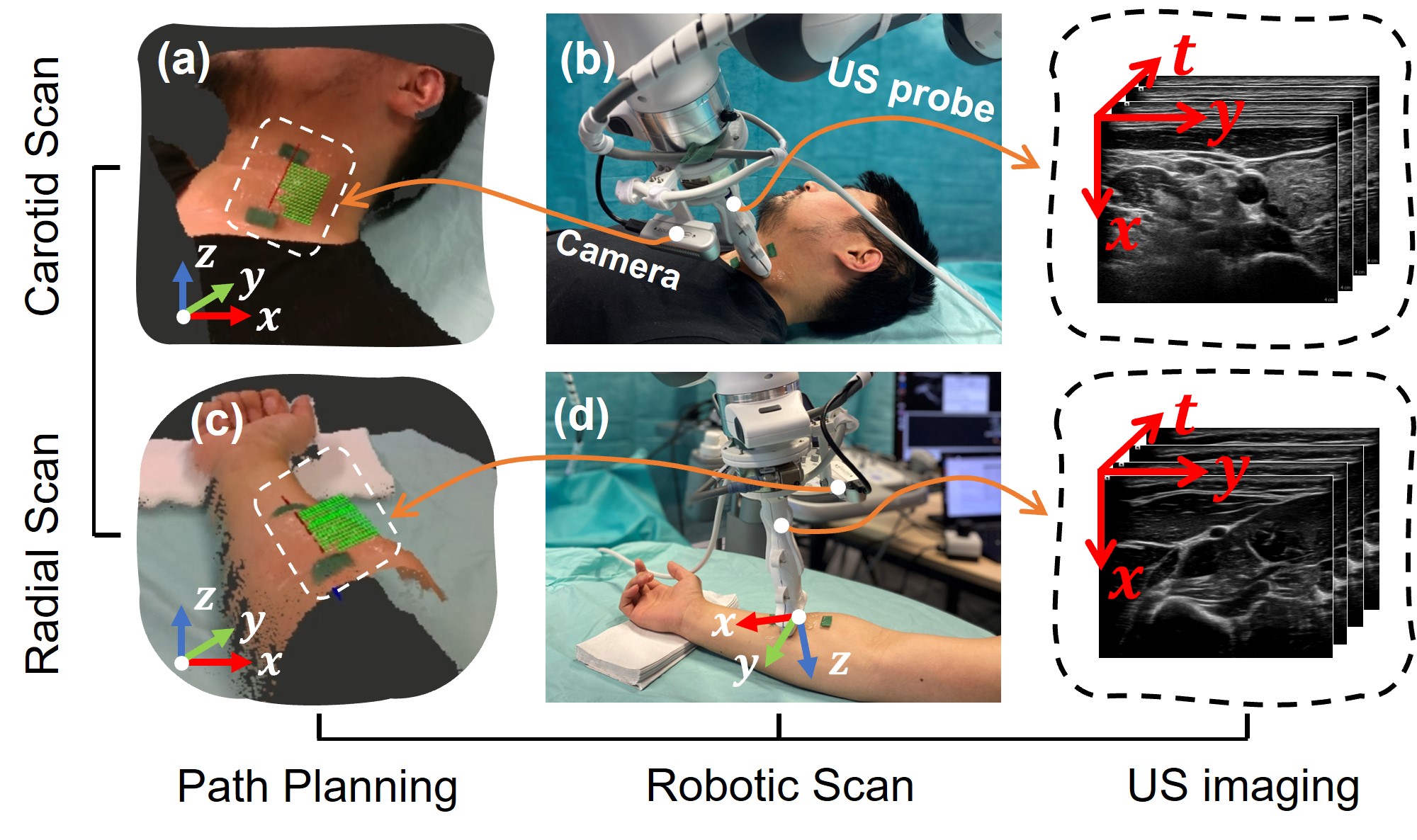
ICRARAG-RUSS: A Retrieval-Augmented Robotic Ultrasound for Autonomous Carotid ExaminationarXiv preprint arXiv:2603.01153, 2026
-
HandbookTranslational Research and Clinical Trends in Robot-Assisted Vascular Surgery: A Narrative OverviewHandbook of Robotic and Image-Guided Surgery, 2026
2025
-
TRO
 Improving Robustness to Out-of-Distribution States in Imitation Learning via Deep Koopman-Boosted Diffusion PolicyIEEE Transactions on Robotics. Code can be found here , 2025
Improving Robustness to Out-of-Distribution States in Imitation Learning via Deep Koopman-Boosted Diffusion PolicyIEEE Transactions on Robotics. Code can be found here , 2025 -
TmechFreehand 3-D Ultrasound Imaging: Sim-in-the-Loop Probe Pose Optimization via Visual ServoingIEEE/ASME Transactions on Mechatronics, 2025
-
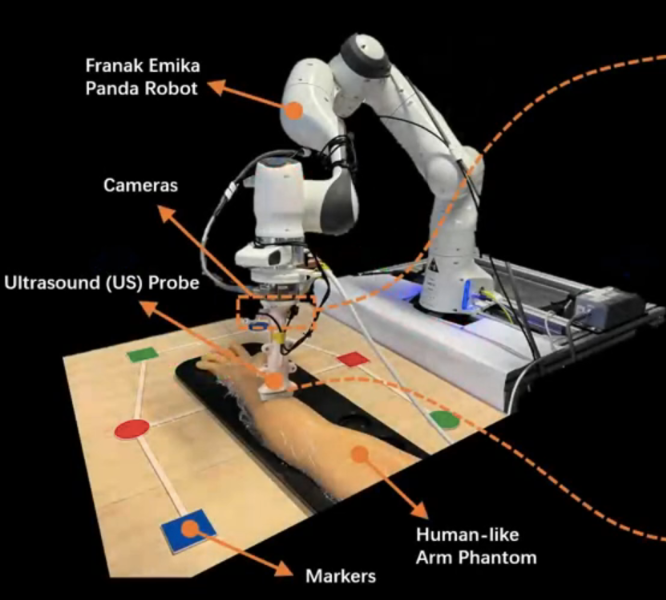
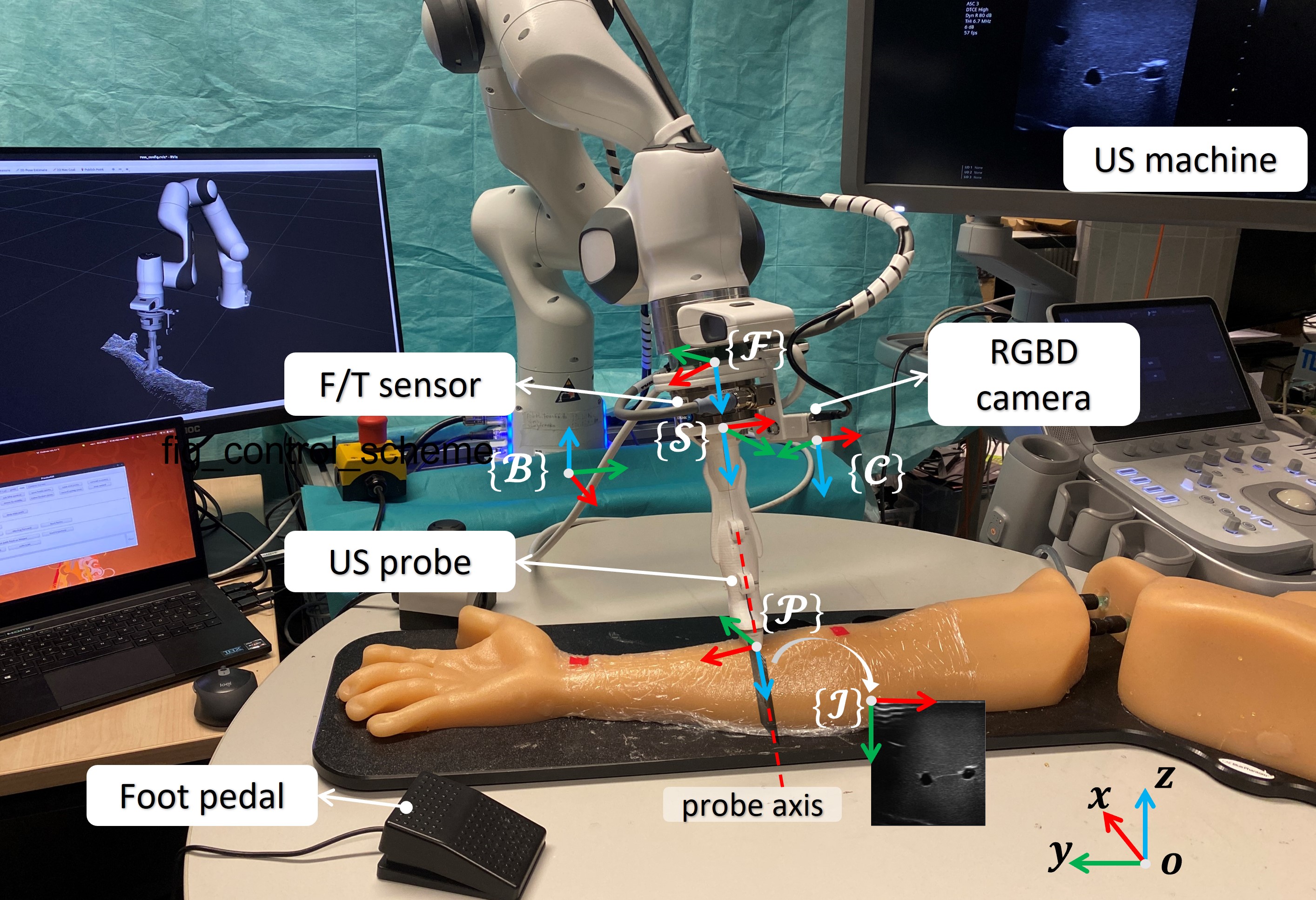
IROSVibration-Based Energy Metric for Restoring Needle Alignment in Autonomous Robotic UltrasoundIn 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
-
IROATactile-Guided Robotic Ultrasound: Mapping Preplanned Scan Paths for Intercostal ImagingIn 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
-
MICCAISemantic scene graph for ultrasound image explanation and scanning guidanceIn International Conference on Medical Image Computing and Computer-Assisted Intervention, 2025
-
IJCARSRobotic CBCT meets robotic ultrasoundInternational Journal of Computer Assisted Radiology and Surgery, 2025
-
ICRA
 Improving Probe Localization for Freehand 3D Ultrasound Using Lightweight CamerasIn 2025 IEEE International Conference on Robotics and Automation (ICRA). Code can be found here , 2025
Improving Probe Localization for Freehand 3D Ultrasound Using Lightweight CamerasIn 2025 IEEE International Conference on Robotics and Automation (ICRA). Code can be found here , 2025 -
TMI
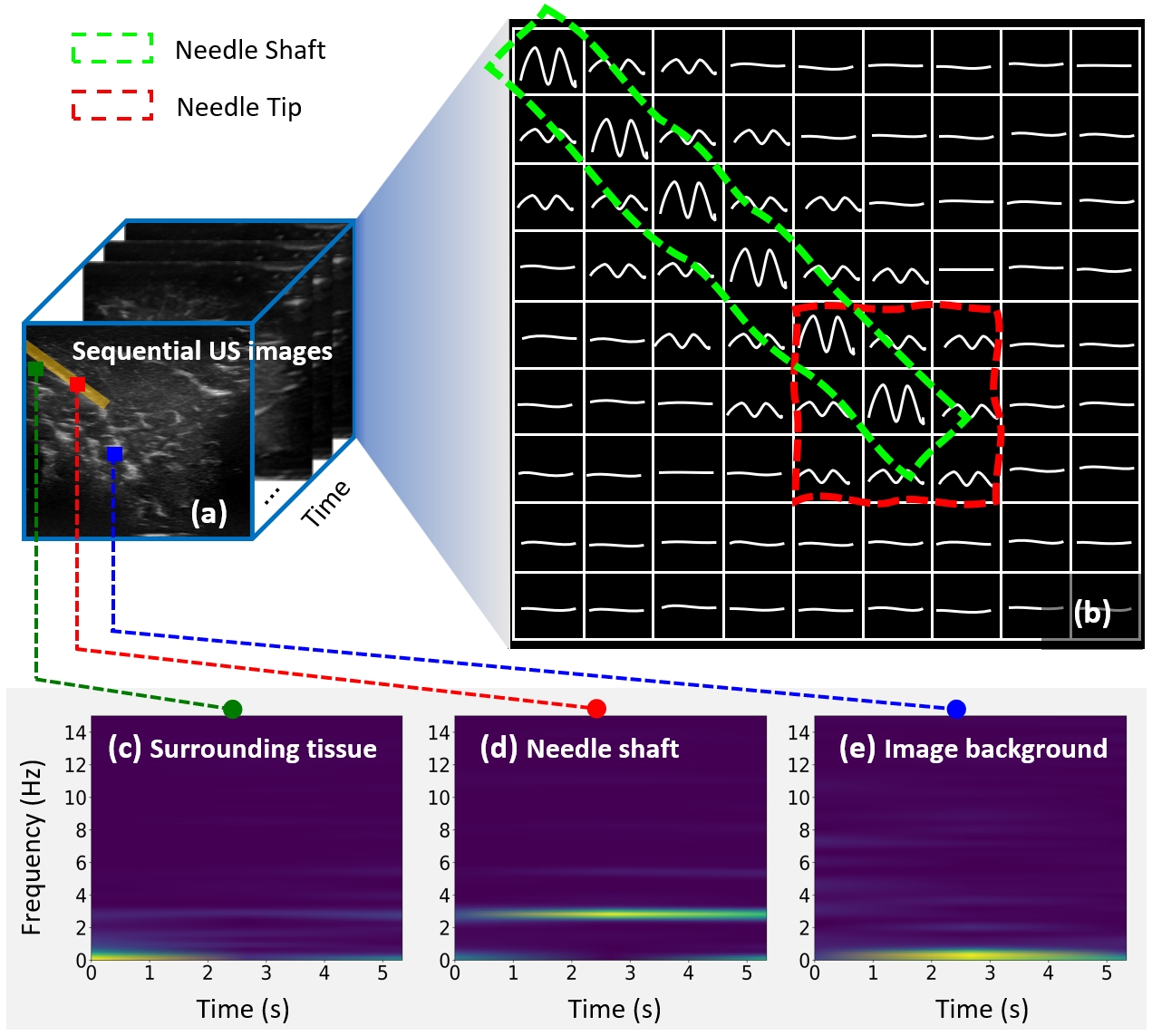 Vibnet: Vibration-boosted needle detection in ultrasound imagesIEEE Transactions on Medical Imaging. Code can be found here , 2025
Vibnet: Vibration-boosted needle detection in ultrasound imagesIEEE Transactions on Medical Imaging. Code can be found here , 2025 -
TUMIntelligent Robotic Ultrasound Imaging: Collaborative Sensing and Active PerceptionTechnische Universität München, 2025
2024
-
ARCRASMachine learning in robotic ultrasound imaging: Challenges and perspectivesAnnual Review of Control, Robotics, and Autonomous Systems, 2024
-
TIISafe multiagent learning with soft constrained policy optimization in real robot controlIEEE Transactions on Industrial Informatics, 2024
-
ICRASg-bot: Object rearrangement via coarse-to-fine robotic imagination on scene graphsIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
-
TASE
 Robot-assisted deep venous thrombosis ultrasound examination using virtual fixtureIEEE Transactions on Automation Science and Engineering. Code can be found here , 2024
Robot-assisted deep venous thrombosis ultrasound examination using virtual fixtureIEEE Transactions on Automation Science and Engineering. Code can be found here , 2024
2023
-
IROS
 Motion magnification in robotic sonography: Enabling pulsation-aware artery segmentationIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Code can be found here , 2023
Motion magnification in robotic sonography: Enabling pulsation-aware artery segmentationIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Code can be found here , 2023 -
ICRAMonograspnet: 6-dof grasping with a single rgb imageIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
-
RASModel predictive optimization for imitation learning from demonstrationsRobotics and Autonomous Systems, 2023
2021
-
IJIRAAdaptive dynamic programming enhanced admittance control for robots with environment interaction and actuator saturation: H. Zhan et al.International Journal of Intelligent Robotics and Applications, 2021
2020
-
TNNLSNeural control of robot manipulators with trajectory tracking constraints and input saturationIEEE Transactions on Neural Networks and Learning Systems, 2020
-
IJARSAdaptive dynamic programming-based controller with admittance adaptation for robot–environment interactionInternational Journal of Advanced Robotic Systems, 2020
2019
2018
-
ICISTComposite learning for trajectory tracking control of robot manipulators with output constraintsIn 2018 Eighth International Conference on Information Science and Technology (ICIST), 2018
-
IJCASOnline robot reference trajectory adaptation for haptic identification of unknown force fieldInternational Journal of Control, Automation and Systems, 2018
2017
-
ICARMAn efficient neural network control for manipulator trajectory tracking with output constraintsIn 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), 2017