Dianye Huang
Medical Intelligence and Robotic Cognition (MIRoC) Lab,
Department of Mechanical Engineering, The University of Hong Kong
Address: Rm G10, Haking Wong Building, Pokfulam Road, HK SAR, China
Email: dianye.huang@hku.hk
Opening Positions – PhD, RA and Interns at HKU:
We are seeking highly motivated students to be part of our team. Click here for more details.
About Me
Dianye Huang (黄典业,黄典業) is currently a Postdoctoral Researcher of the Medical Intelligence and Robotic Cognition (MIRoC) Lab, Department of Mechanical Engineering, The University of Hong Kong (HKU). He received his Ph.D. in Computer Science from the Technische Universität München (TUM), advised by Prof. Nassir Navab, in December 2025, graduating with summa cum laude (highest distinction). He obtained his M.Eng. and B.Eng. degrees from South China University of Technology (SCUT) in 2020 and 2017, respectively. From June 2025, he also works as a senior research scientist at the Computer Aided Medical Procedures (CAMP) Chair at TUM. His work has been published in leading venues such as IEEE TRO, IEEE TMI, IEEE TII, ICRA, and IROS. He also served as an Associate Editor for ICRA 2026 and IROS 2026.
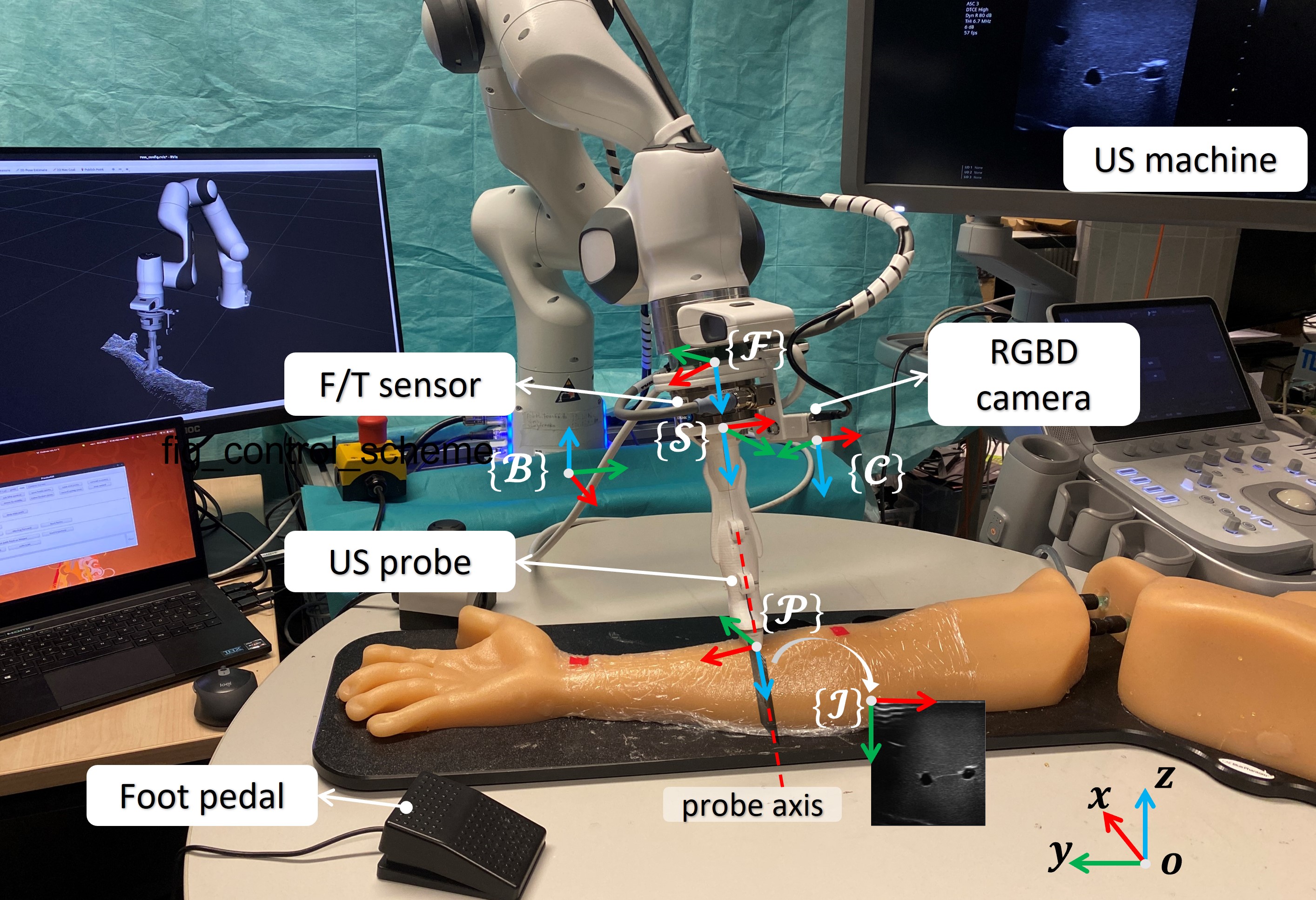
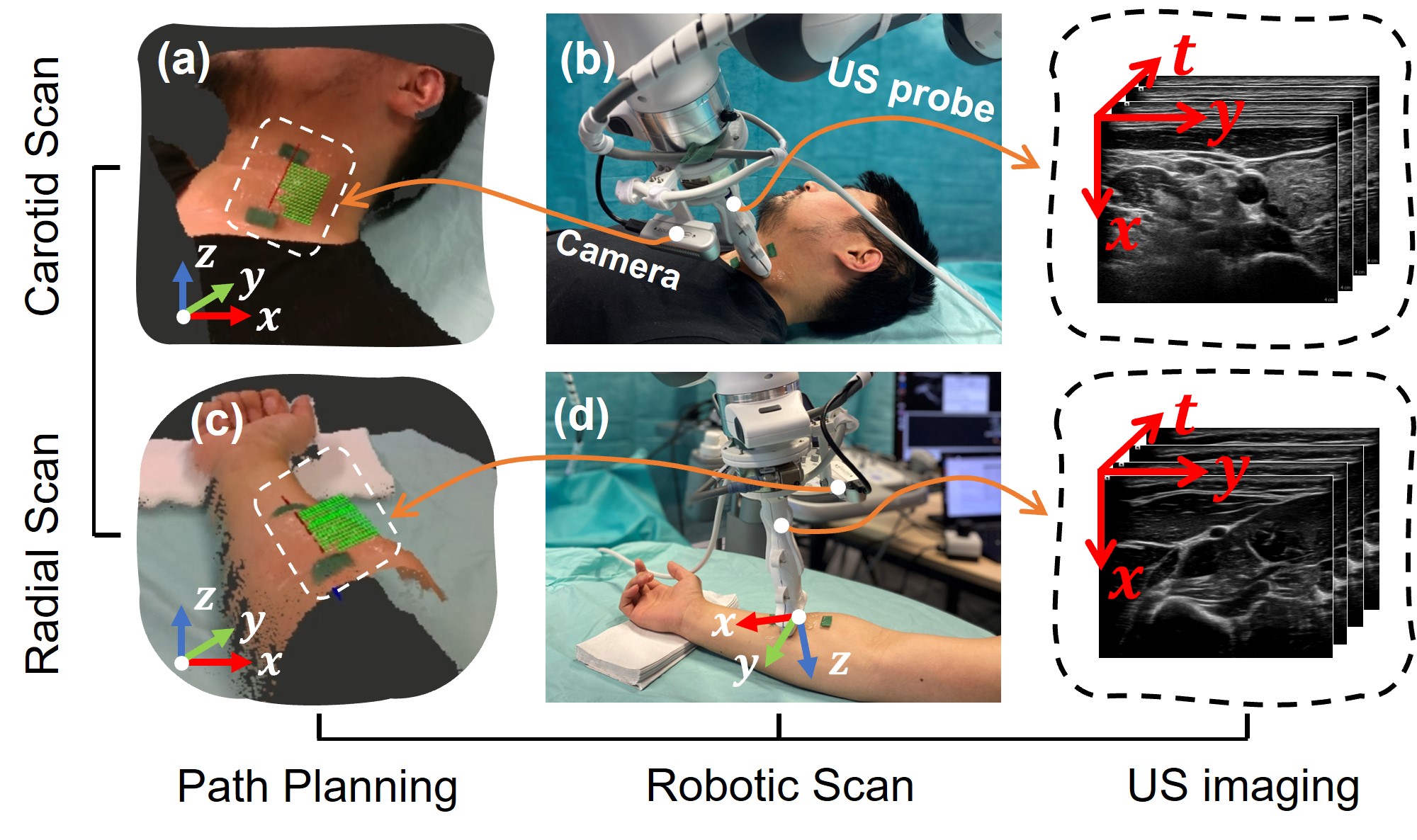
His research focuses on intelligent robotic ultrasound imaging systems, aiming to integrate multimodal sensing for human-like, autonomous ultrasound scanning. This multidisciplinary area lies at the intersection of robotics, computer vision, medical imaging, and machine learning. Accordingly, his research interests span medical image analysis, intelligent robot control and robot learning, including techniques (1). for general manipulation tasks that can be transferred across domains and (2). hold strong potential for the goal of advancing truly intelligent, clinically reliable, and patient-accepted medical robotic systems.
News [all]
Selected Publications
[Google Scholar]
-
TRO
 Improving Robustness to Out-of-Distribution States in Imitation Learning via Deep Koopman-Boosted Diffusion PolicyIEEE Transactions on Robotics. Code can be found here , 2025
Improving Robustness to Out-of-Distribution States in Imitation Learning via Deep Koopman-Boosted Diffusion PolicyIEEE Transactions on Robotics. Code can be found here , 2025 -
ICRA
 Improving Probe Localization for Freehand 3D Ultrasound Using Lightweight CamerasIn 2025 IEEE International Conference on Robotics and Automation (ICRA). Code can be found here , 2025
Improving Probe Localization for Freehand 3D Ultrasound Using Lightweight CamerasIn 2025 IEEE International Conference on Robotics and Automation (ICRA). Code can be found here , 2025 -
TMI
 Vibnet: Vibration-boosted needle detection in ultrasound imagesIEEE Transactions on Medical Imaging. Code can be found here , 2025
Vibnet: Vibration-boosted needle detection in ultrasound imagesIEEE Transactions on Medical Imaging. Code can be found here , 2025 -
TASE
 Robot-assisted deep venous thrombosis ultrasound examination using virtual fixtureIEEE Transactions on Automation Science and Engineering. Code can be found here , 2024
Robot-assisted deep venous thrombosis ultrasound examination using virtual fixtureIEEE Transactions on Automation Science and Engineering. Code can be found here , 2024 -
IROS
 Motion magnification in robotic sonography: Enabling pulsation-aware artery segmentationIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Code can be found here , 2023
Motion magnification in robotic sonography: Enabling pulsation-aware artery segmentationIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Code can be found here , 2023